How to test before buying
Use this guide as a pre-RFQ decision filter, not as a part-number shortcut.
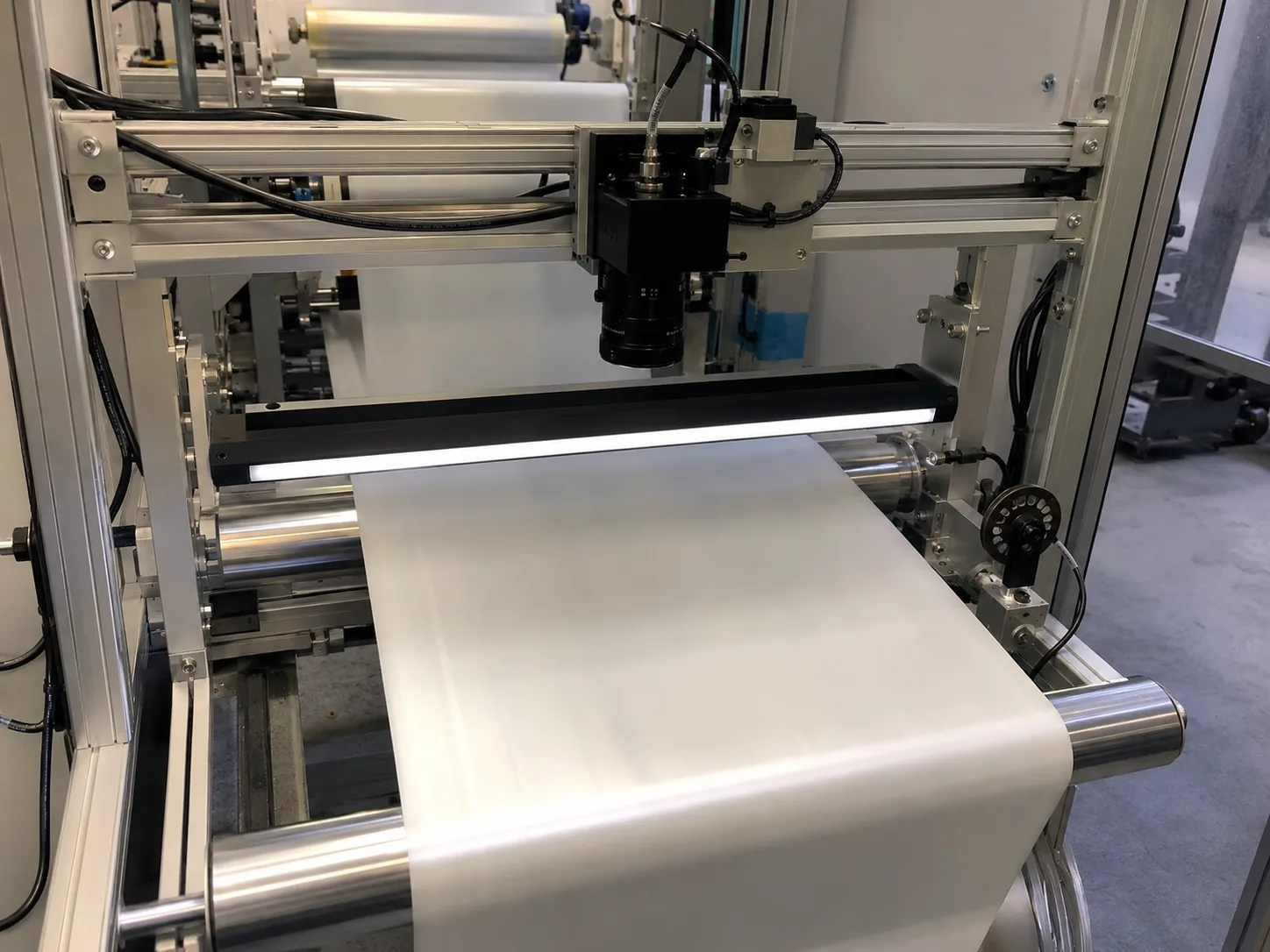
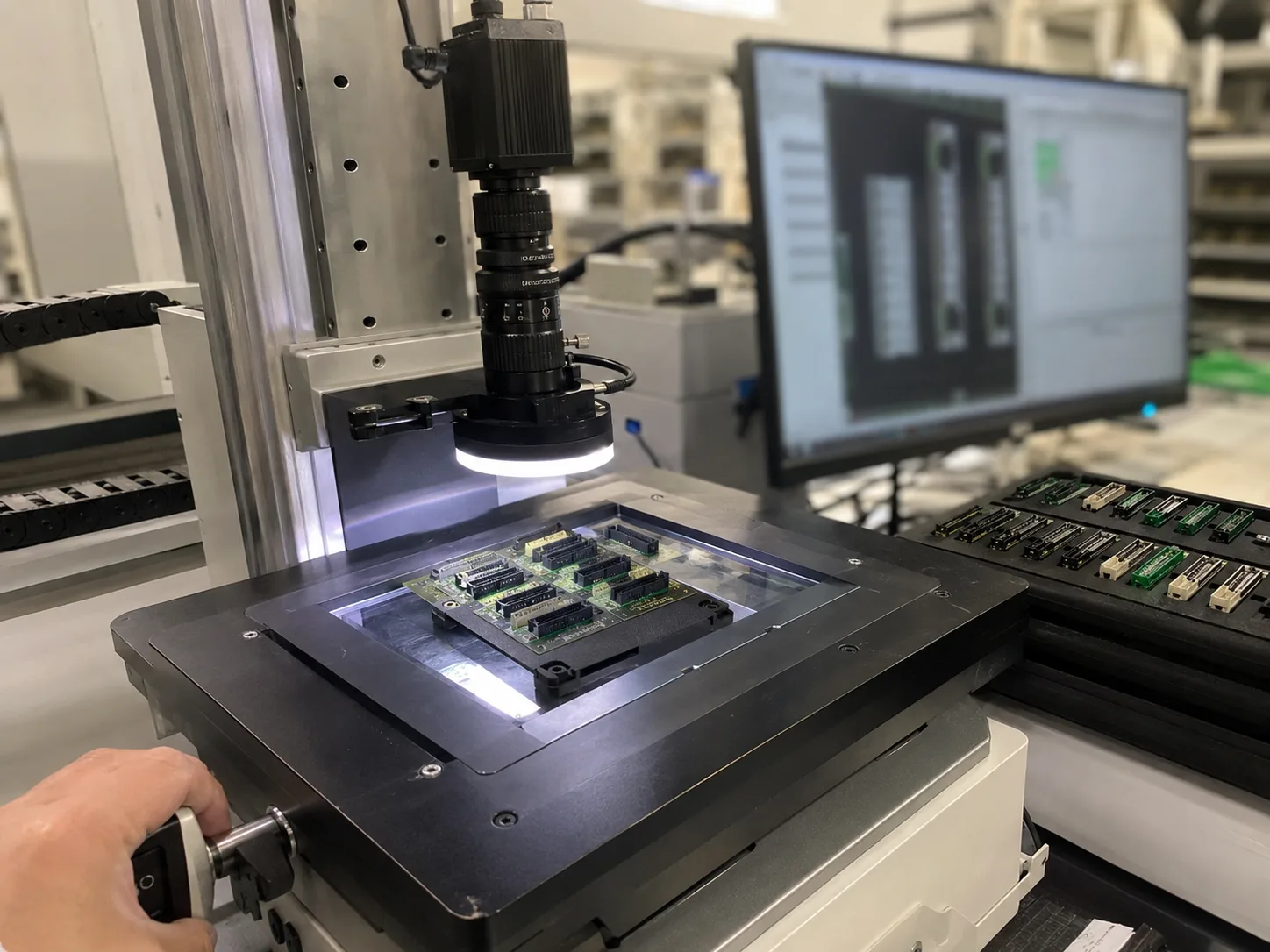
Machine vision selection is usually stable when the project starts from the inspection condition instead of a catalog model. Before requesting a quote, define what must be detected or measured, how the part moves, what surface behavior affects contrast and which factory constraint cannot change.
Use this guide to translate the requirement into testable inputs: sample images, target tolerance, line speed, field of view, working distance, mounting envelope and the current failure mode. That gives the factory enough evidence to map the request to camera, lighting, optics, reader or 3D routes.