見積前に確認するプロジェクト種類と結果証拠。
部品位置、高さ、重なりがピック結果を変え、校正を現場で維持する必要がある場合に適しています。
ロボットガイダンス サンプル画像、許容差、ライン条件、連携条件を選定前に確認。
匿名化された納品ルート
部品供給状態に合わせて2Dまたは3Dビジョンでロボットのピック、位置決め、組立を支援するルート。 このルートでは、技術確認に必要な測定項目とRFQ証拠を整理します。
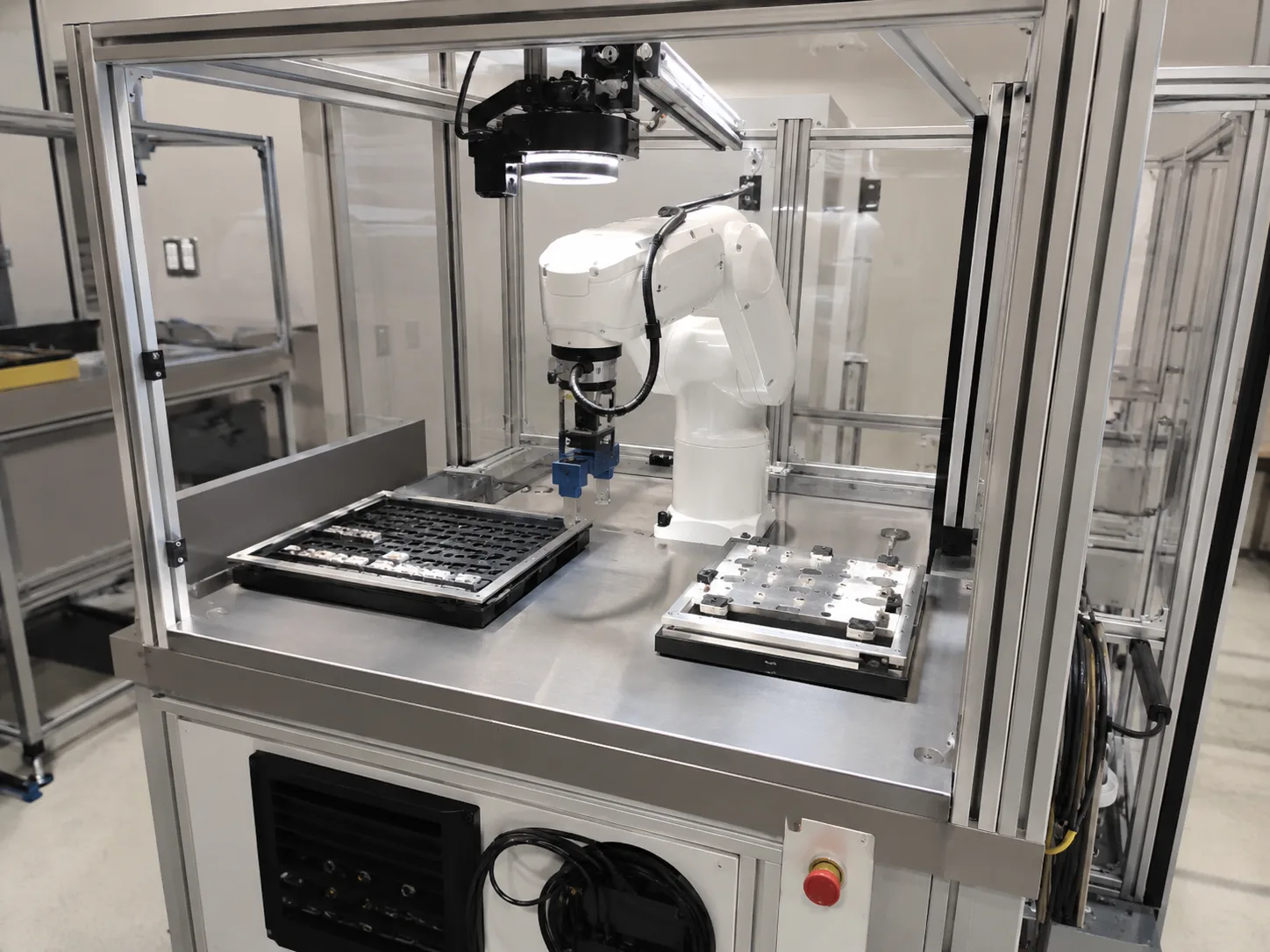
部品位置、高さ、重なりがピック結果を変え、校正を現場で維持する必要がある場合に適しています。
部品の置かれ方、高さばらつき、照明変化により座標出力がずれると、ロボットガイダンスは安定しません。
平面位置が安定している場合は2D、重なりや高さ、形状変化が把持に影響する場合は3Dビジョンを使います。
しきい値固定前のサンプル比較
判断フレーム
検査課題、ライン条件、ハードウェア構成、RFQ証拠でルートを整理します。
部品の置かれ方、高さばらつき、照明変化により座標出力がずれると、ロボットガイダンスは安定しません。
しきい値固定前のサンプル比較 ライン速度での最悪条件テスト
カメラ・レンズ構成 / 照明テスト / トリガーとI/O出力 / 取付または治具確認
良品/不良品サンプル画像 / 許容差、欠陥サイズ、読み取り距離 / ライン速度とトリガー条件
検証ワークフロー
適切な製品カテゴリは、サンプル、ライン条件、合格基準で変わります。問い合わせを検証可能な形に整理します。
信頼情報
検査プロジェクトには欠陥、ライン速度、工場プロセスが含まれます。そのためDeyi Visionは匿名化された納品ルートを公開し、顧客名、図面、工場写真は許可がある場合だけ開示します。
関連製品カテゴリ
関連する選定ページ
カメラ、レンズ、照明、リーダー、3D、フィーダーを単体ではなく検査システムとして確認します。
用途カメラ、レンズ、照明、リーダー、3D、フィーダーを単体ではなく検査システムとして確認します。
用途カメラ、レンズ、照明、リーダー、3D、フィーダーを単体ではなく検査システムとして確認します。
ガイドRFQ前に検査目的、許容差、表面状態、生産条件を整理するためのガイドです。
ガイドRFQ前に検査目的、許容差、表面状態、生産条件を整理するためのガイドです。
ガイドRFQ前に検査目的、許容差、表面状態、生産条件を整理するためのガイドです。
用途別RFQ
サンプル画像、ライン速度、許容差、現在の不具合を送ってください。カメラ、照明、レンズ、リーダー、3D、スマートカメラの構成に整理します。
技術相談を送る用途FAQ
いいえ。匿名化された納品ルートとして、顧客名を出さずに技術条件、証拠、合格基準を示しています。
良品/不良品サンプル、画像、許容差、ライン速度、設置スペース、出力インターフェースを送ってください。
最終構成はサンプル画像、速度、許容差、取付条件を確認してから決まります。
平面位置が安定している場合は2D、重なりや高さ、形状変化が把持に影響する場合は3Dビジョンを使います。