견적 전 확인해야 할 프로젝트 유형과 결과 근거.
부품 위치, 높이, 겹침이 픽업 결과를 바꾸고 캘리브레이션을 유지해야 할 때 적합합니다.
로봇 가이던스 샘플 이미지, 공차, 라인 조건, 통합 데이터를 선정 전에 확인.
익명 납품 경로
부품 공급 상태에 따라 2D 또는 3D 비전으로 로봇 픽, 위치 결정, 조립을 지원하는 경로. 이 경로는 기술 검토에 필요한 측정 항목과 RFQ 근거를 정리합니다.
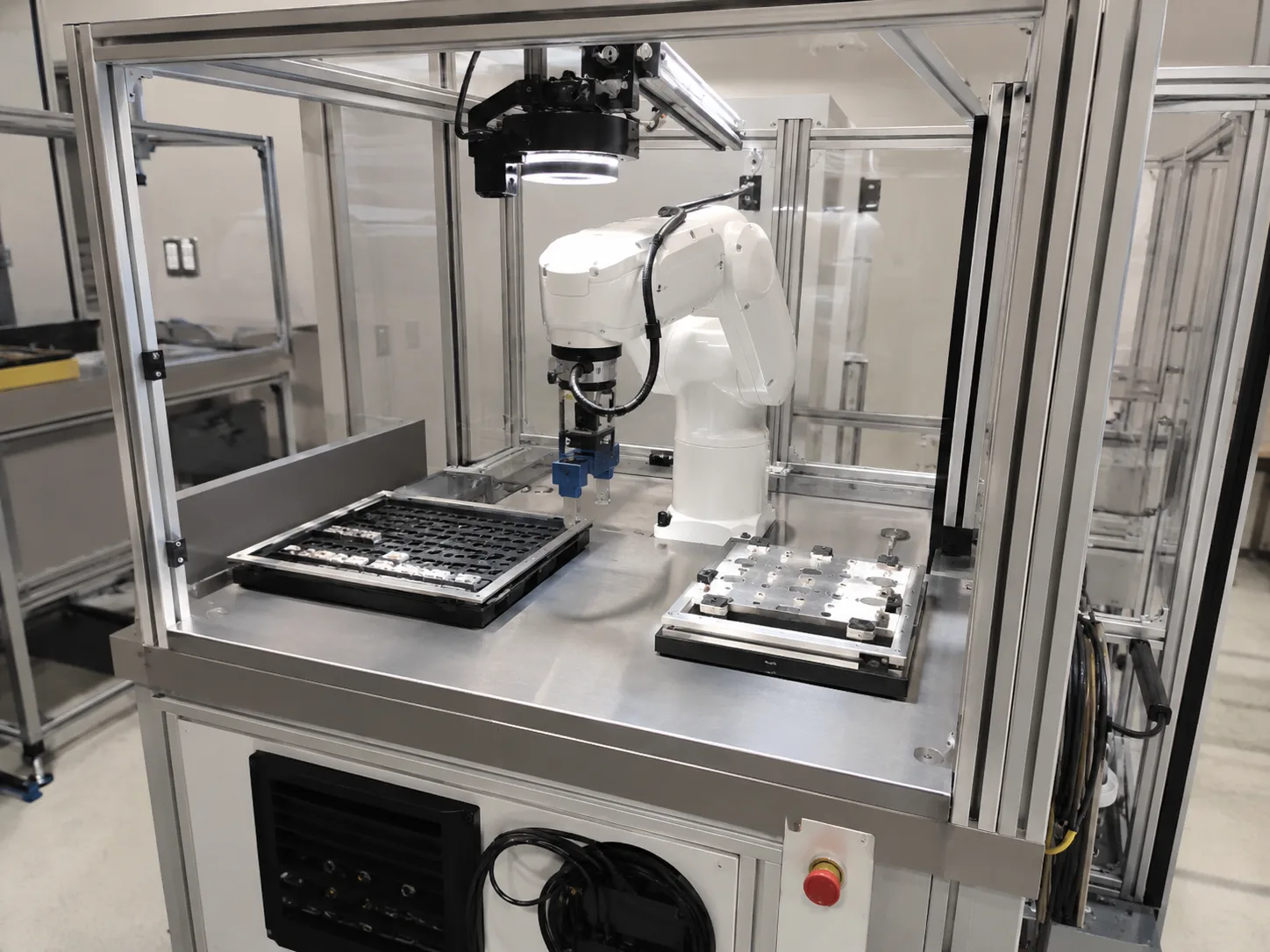
부품 위치, 높이, 겹침이 픽업 결과를 바꾸고 캘리브레이션을 유지해야 할 때 적합합니다.
부품 제시 방식, 높이 변화, 조명 변화가 좌표 출력을 바꾸면 로봇 가이던스가 불안정해집니다.
평면 위치가 안정적이면 2D 비전을, 높이, 겹침, 형상 변화가 픽업에 영향을 주면 3D 비전을 사용합니다.
임계값 고정 전 샘플 비교
의사결정 프레임
검사 문제, 라인 제약, 하드웨어 스택, RFQ 근거로 경로를 정리합니다.
부품 제시 방식, 높이 변화, 조명 변화가 좌표 출력을 바꾸면 로봇 가이던스가 불안정해집니다.
임계값 고정 전 샘플 비교 라인 속도에서 worst-case 테스트
카메라 및 렌즈 경로 / 조명 테스트 / 트리거와 I/O 출력 / 장착 또는 지그 확인
OK/NG 샘플 이미지 / 공차, 결함 크기 또는 판독 거리 / 라인 속도와 트리거 조건
검증 워크플로
적합한 제품군은 샘플, 라인 조건, 합격 기준에 따라 달라집니다. 문의를 테스트 가능한 형태로 정리합니다.
신뢰 근거
검사 프로젝트는 결함, 라인 속도, 공정 정보를 포함합니다. Deyi Vision은 익명 납품 경로를 공개하고 고객명, 도면, 공장 사진은 승인 후에만 공유합니다.
관련 제품군
관련 선정 페이지
카메라, 렌즈, 조명, 리더, 3D, 피더를 단품이 아니라 검사 시스템 경로로 검토합니다.
적용 분야카메라, 렌즈, 조명, 리더, 3D, 피더를 단품이 아니라 검사 시스템 경로로 검토합니다.
적용 분야카메라, 렌즈, 조명, 리더, 3D, 피더를 단품이 아니라 검사 시스템 경로로 검토합니다.
가이드RFQ 전에 검사 목표, 허용 오차, 표면 조건, 생산 제약을 정리하기 위한 가이드입니다.
가이드RFQ 전에 검사 목표, 허용 오차, 표면 조건, 생산 제약을 정리하기 위한 가이드입니다.
가이드RFQ 전에 검사 목표, 허용 오차, 표면 조건, 생산 제약을 정리하기 위한 가이드입니다.
적용 RFQ
샘플 이미지, 라인 속도, 공차, 현재 불량 모드를 보내면 카메라, 조명, 렌즈, 리더, 3D 또는 스마트 카메라 경로로 정리합니다.
기술 RFQ 보내기적용 FAQ
아닙니다. 고객명을 보호하면서 기술 조건, 근거, 합격 기준을 설명하는 익명 납품 경로입니다.
OK/NG 샘플, 이미지, 공차, 라인 속도, 설치 공간, 출력 인터페이스를 보내주세요.
최종 경로는 샘플 이미지, 속도, 공차, 장착 조건을 확인한 뒤 결정됩니다.
평면 위치가 안정적이면 2D 비전을, 높이, 겹침, 형상 변화가 픽업에 영향을 주면 3D 비전을 사용합니다.